Gare-E Arduino Robot Tank
Blog post description.
Gare-E Arduino Robot Tank
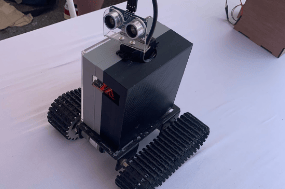
The Gare-E Arduino Robot Tank is an impressive and versatile piece of technology. It is powered by an Arduino board, which allows for easy programming and customization. With its tank-like design, this robot is capable of traversing various terrains with ease. It also possesses a wide range of sensors, enabling it to interact with its environment and respond accordingly. The Gare-E Arduino Robot Tank is equipped with a camera that provides a live video feed, allowing users to remotely monitor and control it. Its sturdy construction ensures durability, making it suitable for both indoor and outdoor use. Whether for educational purposes or simply for entertainment, this robot tank offers endless possibilities for exploration and experimentation.
Want to see how and why this works?
We have made quality our habit. It’s not something that we just strive for – we live by this principle every day.
OUR STORY
Here is the rundown:
This Arduino Robot is equipped with sensors that allow it to detect objects in its path. Using these sensors, the robot can determine if there is anything in front of it. If the sensors detect an obstacle, the robot will adjust its course by turning in the opposite direction. This functionality enables the robot to navigate its surroundings and avoid collisions. The sensors provide the robot with real-time feedback, allowing it to continuously adapt its movements based on its environment. With this advanced sensing capability, the Arduino Robot can confidently explore its surroundings and interact with objects in a safe and efficient manner.
OUR STORY
Read and Average Distance:
This function sets the color of all LEDs in a NeoPixel strip to a specified RGB value. It iterates through each LED in the strip and sets its color accordingly. Finally, it updates the LEDs to display the new color.
OUR STORY
Turret Module:
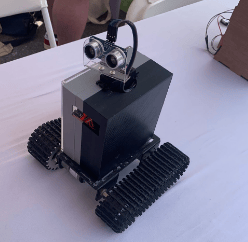
On the top of the tank, there is a Servo Motor with the Ultrasonic Sensor attached to it. We call this the turret module.
This turret module causes the tank to stop if it detects something in front of it, then it turns the Sensor to the left and to the right to scan if there is a clear path in any direction it will move in that direction. But if there is no path, it will cause the robot to do a full 180 degree turn. The cycle repeats from here.
OUR STORY
Turning based on direction and object distance:
This functionality involves determining the direction for the robot to turn based on the detected distance of objects in its environment. It dynamically adjusts the robot's course to avoid obstacles or reach a target location effectively, enhancing its navigation capabilities.
OUR STORY
Set Color:
This function is designed to change the color of the LEDs inside the robot depending on the direction it needs to turn. When the robot turns left, the LEDs will display a specific color, while turning right will result in a different color. If the robot is moving straight, another color will be displayed, and going in reverse will trigger yet another color change. By using this function, the robot can visually indicate its intended direction to those around it. This adds an extra level of communication and enhances the overall user experience.
OUR STORY
First Iteration
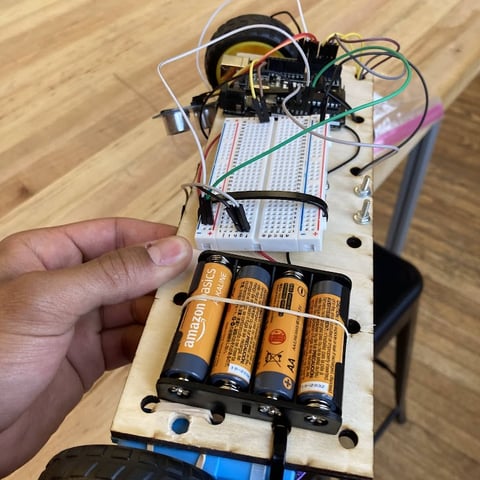
The process behind getting this robot functioning, took about 2 months including its first iteration.
In the first iteration, I wanted to see how to get the motors to move in accordance with the data from the sensors. I also wanted to test, how to get the LEDs to respond based off of this same sensor data.
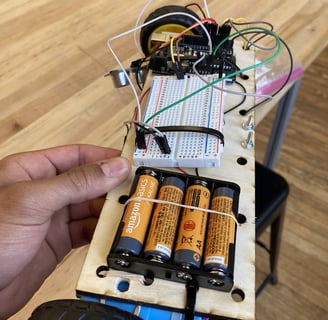
Integrating the Lessons learned from first Iteration, into the Final Design.
We have made quality our habit. It’s not something that we just strive for – we live by this principle every day.
Want to see the full code?
Download this text file that the code used within this robot!